페이지 정보
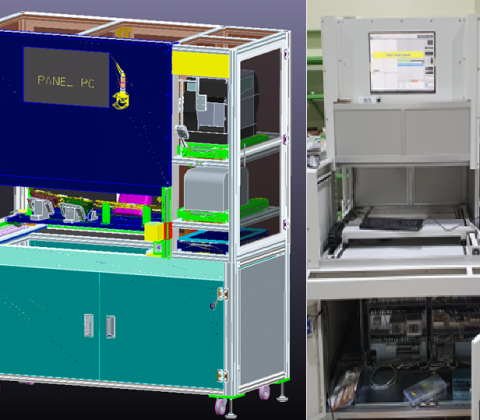
프로젝트 : 3축 로봇 제품 이동 설비
프로젝트 : 3축 로봇 제품 이동 설비
본문
Detailed information
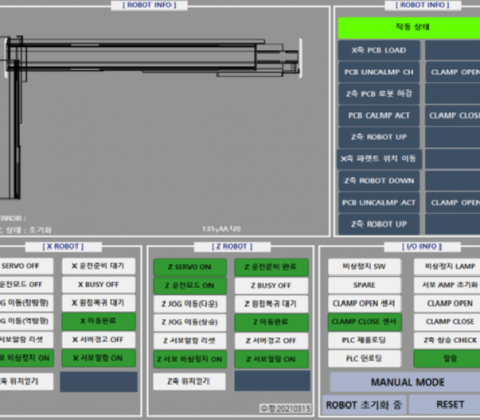
1. PLC 구성
1) HW 구성
- 서보 앰프 : 미쓰비시* 3 EA
- 서보 모터 : 미쓰비시* 3 EA
- 로봇 : 로봇스타 *3EA
- PLC : 미쓰비시 *1EA
- 모션카드 : 미쓰비시 4축 1EA
- 텔레센트릭 (0.8x) CCTV (16mm)
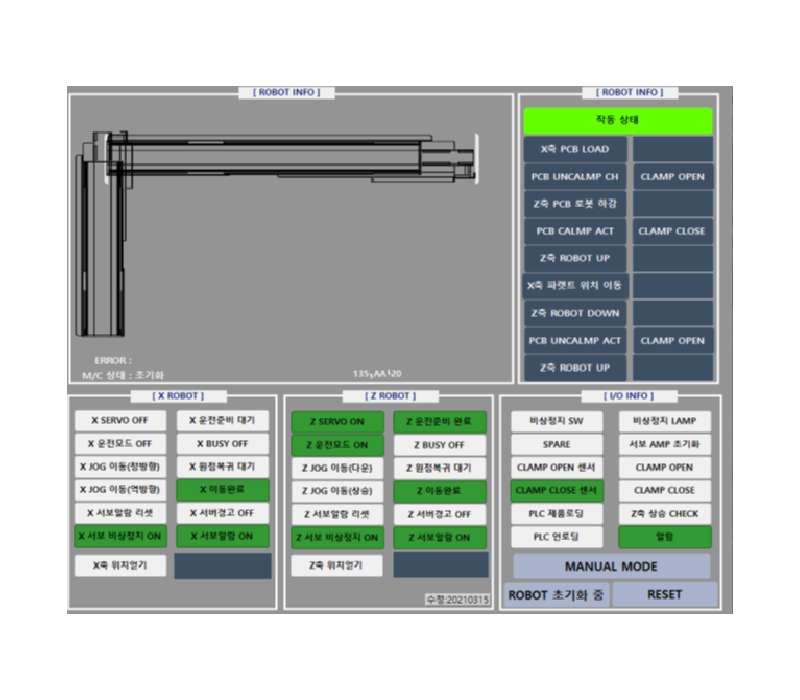
2. 소프트웨어
1) 개발 환경
- 개발 언어 : 미쓰비스 PLC